How it works...
Network RTK
Network RTK requires a recommended minimum of five reference stations (there is no maximum) with an inter-station spacing of up to 70 km. The reference stations are usually permanent installations and form the RTK Network , which is the backbone of the Network RTK principle.
The Principle
The principle of Network RTK begins with all reference stations within the RTK Network continuously streaming satellite observations to a central server running Network RTK software.
The aim of Network RTK is to minimise the influence of the distance dependant errors on the rovers computed position within the bounds of the network. The Network RTK server software begins this process by:
Which algorithm the rover uses, and how the distance dependent errors are minimized is very much dependent on the Network RTK method being used.
Previously we mentioned MAX, and Virtual Reference Station as examples of Network RTK methods available in the market - each of these methods minimizes (or models) the errors in different ways. Depending on the method, this modeling is either carried out on the Network RTK server or at the rover. Therefore, the relationship between the RTK Network and the rover is different for each method which can lead to significant differences in performance, accuracy, reliability and traceability for the rover.
The Principle
The principle of Network RTK begins with all reference stations within the RTK Network continuously streaming satellite observations to a central server running Network RTK software.
The aim of Network RTK is to minimise the influence of the distance dependant errors on the rovers computed position within the bounds of the network. The Network RTK server software begins this process by:
- Fixing the ambiguities of the satellites (being observed by the reference stations) within the network; and
- Using the data from all (or a subset of) reference stations to generate corrections that are sent out to the rover (Fig. 3).
Which algorithm the rover uses, and how the distance dependent errors are minimized is very much dependent on the Network RTK method being used.
Previously we mentioned MAX, and Virtual Reference Station as examples of Network RTK methods available in the market - each of these methods minimizes (or models) the errors in different ways. Depending on the method, this modeling is either carried out on the Network RTK server or at the rover. Therefore, the relationship between the RTK Network and the rover is different for each method which can lead to significant differences in performance, accuracy, reliability and traceability for the rover.
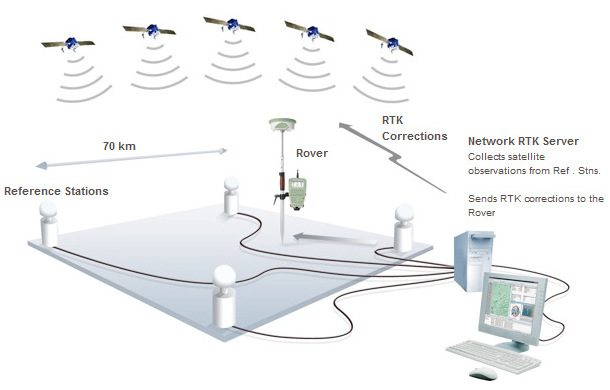
Figure 3: Principle of Network RTK
Advantages of Network RTK
- No need to set up a base station
- The accuracies of the computed rover positions are more homogeneous.
- The accuracy is maintained over larger distances between the reference stations and the rover.
- The same area can be covered with fewer reference stations (i.e. compared to the number of permanent reference stations required using Single Reference RTK).
- Higher reliability and availability of RTK corrections (e.g. one station goes down, another station can take over).
Disadvantages of Network RTK
- The cost to subscribe to an RTK Network and receive Network RTK corrections Now we have an overview of how Network RTK works the main question is: Is it economically worth subscribing to an RTK Network and receiving Network RTK corrections? The time needed to setup the reference station.
OUR SERVICES
APPLICATIONS
EXPLORE FEATURES
